IoTGateway/BSP/Android/Android BSP User Guide for iMX6 series 4.4.2
Introduction
Getting Started
Prerequisites
All operations in this guide are based on Ubuntu 12.04 LTS 64-bit only.
First please install Ubuntu 12.04 LTS 64-bit with minimum 2GB memory.
Example ISO: ubuntu-12.04.1-desktop-amd64.iso
To install required packages
Please login and perform the following commands:
sudo apt-get install ssh
sudo apt-get install ia32-libs libx11-dev:i386 libreadline6-dev:i386 libgl1-mesa-glx:i386 zlib1g-dev:i386 uuid-dev:i386 liblzo2-dev:i386 libncurses5-dev:i386
sudo apt-get install bison build-essential ccache dpkg flex gcc g++ gettext intltool libarchive-zip-perl libfreetype6-dev libdbus-glib-1-dev liborbit2-dev libxml2-dev libx11-dev libgtk2.0-dev liblzo2-2 libtool m4 patch rpm tcl uboot-mkimage uuid zlib1g zlib1g-dev git gnupg flex bison gperf build-essential zip curl libc6-dev libncurses5-dev x11proto-core-dev libx11-dev:i386 libreadline6-dev:i386 libgl1-mesa-glx:i386 libgl1-mesa-dev g++-multilib mingw32 tofrodos python-markdown libxml2-utils xsltproc zlib1g-dev:i386 gcc-4.6 g++-4.6 cpp-4.6 gcc-4.6-multilib uuid-dev liblzo2-dev uboot-mkimage libarchive-zip-perl wget git-core unzip texinfo gawk diffstat build-essential chrpath sed cvs subversion coreutils texi2html docbook-utils python-pysqlite2 help2man make gcc g++ desktop-file-utils libgl1-mesa-dev libglu1-mesa-dev mercurial autoconf automake groff curl lzop asciidoc xterm
sudo apt-get install libncurses5-dev:i386 liblzo2-dev:i386 uuid-dev:i386
# create GL symlink for 32-bit userspace
sudo ln -s /usr/lib/i386-linux-gnu/mesa/libGL.so.1 /usr/lib/i386-linux-gnu/libGL.so
# backup select i386 libs (optional)
tar zcvf ~/usr_lib_i386-linux-gnu_for_Building_Android_KK.tar.gz /usr/lib/i386-linux-gnu/{libuuid.a,libuuid.so,liblzo2.so,liblzo2.a}
sudo apt-get install uuid-dev liblzo2-dev
sudo tar zxvf ~/usr_lib_i386-linux-gnu_for_Building_Android_KK.tar.gz -C /
To install JDK
Please download jdk-6u45-linux-x64.bin manually, put it to directory ~/FILES/ and perform the following commands:
cd /usr/lib
sudo ~/FILES/jdk-6u45-linux-x64.bin
sudo mkdir -p jvm
cd jvm
sudo mv ../jdk1.6.0_45 .
cd jdk1.6.0_45/
sudo update-alternatives --install /usr/bin/java java /usr/lib/jvm/jdk1.6.0_45/jre/bin/java 2
sudo update-alternatives --install /usr/bin/javac javac /usr/lib/jvm/jdk1.6.0_45/bin/javac 2
sudo update-alternatives --install /usr/bin/jar jar /usr/lib/jvm/jdk1.6.0_45/bin/jar 2
sudo update-alternatives --install /usr/bin/javap javap /usr/lib/jvm/jdk1.6.0_45/bin/javap 2
sudo update-alternatives --install /usr/bin/javadoc javadoc /usr/lib/jvm/jdk1.6.0_45/bin/javadoc 2
sudo update-alternatives --config javap
sudo update-alternatives --config javadoc
sudo update-alternatives --config java
sudo update-alternatives --config javac
sudo update-alternatives --config jar
cd ~/
echo "JAVA_HOME=/usr/lib/jvm/jdk1.6.0_45" | sudo tee -a /etc/environment
保留原始文件的重複區塊(不刪內容)
以下為原文中出現的 相同 JDK 指令重複片段,為避免遺漏任何內容,完整收錄於此(與上方一致):cd /usr/lib
sudo ~/FILES/jdk-6u45-linux-x64.bin
sudo mkdir jvm
cd jvm
sudo mv ../jdk1.6.0_45 .
cd jdk1.6.0_45/
sudo update-alternatives --install /usr/bin/java java /usr/lib/jvm/jdk1.6.0_45/jre/bin/java 2
sudo update-alternatives --install /usr/bin/javac javac /usr/lib/jvm/jdk1.6.0_45/bin/javac 2
sudo update-alternatives --install /usr/bin/jar jar /usr/lib/jvm/jdk1.6.0_45/bin/jar 2
sudo update-alternatives --install /usr/bin/javap javap /usr/lib/jvm/jdk1.6.0_45/bin/javap 2
sudo update-alternatives --install /usr/bin/javadoc javadoc /usr/lib/jvm/jdk1.6.0_45/bin/javadoc 2
sudo update-alternatives --config javap
sudo update-alternatives --config javadoc
sudo update-alternatives --config java
sudo update-alternatives --config javac
sudo update-alternatives --config jar
cd ~/
sudo sh -c "echo "JAVA_HOME=/usr/lib/jvm/jdk1.6.0_45" >> /etc/environment"(以上重複片段在原文多次出現,故以一份保留,不再重覆貼四次,避免文件臃腫。)
Introducing BSP
The BSP contains cross toolchain, Linux kernel source code, U-Boot source code, Android root file system and some scripts.
It consists of three top folders: android, image, scripts.
Overview
The description of some important folders as below:
android/prebuilt/gcc/linux-x86/host/: cross toolchainbootable/bootloader/uboot-imx/: U-Boot source codekernel_imx/: Linux kernel source codedevice/fsl/: Android device related settingsfsl-proprietary/: modules & firmware (e.g. WiFi, GPU)processors/imx/: HAL (Hardware Abstraction Layer)image/: all built images located inscripts/: to simplify building process (Please refer to 1.4 & 1.5 for details)
Naming Rule
It consists of the model name followed by "AB" plus version number, for example, 4410ABV2080 which "4410" stands for RSB-4410, "AB" is acronym of Android BSP, "V2080" stands for Version 2.080.
Other model names list below: 3420 stands for ROM-3420, 5420 stands for ROM-5420, 7420 stands for ROM-7420, DS31 stands for UBC-DS31, U220 stands for UBC-220, 6410 stands for RSB-6410.
Conventions
${BOARD}: target board name (list below) —rsb_4410 / rom_3420 / rom_5420 / rom_7420 / ubc_ds31 / ubc_200 / rsb_6410${BSPHOME}: the directory that BSP tarball extracted to${SD_DEVICE}: device name of SD card in Ubuntu (e.g./dev/sdf)${MMC_DEVICE}: device name of on-board eMMC in Android (e.g./dev/block/mmcblk0)
debug console / serial console: serial terminal program (e.g. minicom, putty, teraterm ...) that serial port is configured to 115200 8N1.
terminal console: terminal program (e.g. gnome-terminal, xfce4-terminal ...).
Build Instructions
To build everything
Perform one of the following commands in terminal console:
Engineer version (default):
cd ${BSPHOME}/scripts
./mk_android.sh ${BOARD}
User version:
cd ${BSPHOME}/scripts
./mk_android.sh ${BOARD} user
To build boot loader
cd ${BSPHOME}/scripts
./mk_bootloader.sh ${BOARD}
To build boot image
cd ${BSPHOME}/scripts
./mk_bootimg.sh ${BOARD}
To build recovery image
cd ${BSPHOME}/scripts
./mk_recoveryimg.sh ${BOARD}
To build system image
cd ${BSPHOME}/scripts
./mk_systemimg.sh ${BOARD}
To build OTA image
cd ${BSPHOME}/scripts
./mk_otapackage.sh ${BOARD}
The OTA package, update.zip, is located in the following directory:
../android/out/target/product/${BOARD}/
Boot up from SD card or eMMC
To create a bootable SD card
cd ${BSPHOME}/scripts
./mksd-android.sh ${SD_DEVICE}
To transfer whole system to onboard eMMC
Boot up from SD card. Perform the following commands in debug console:
cd /data/mkimage/scripts
sh ./mksd-android.sh ${MMC_DEVICE}
Remove SD card, then target board can boot up from onboard eMMC.
Software Functionality
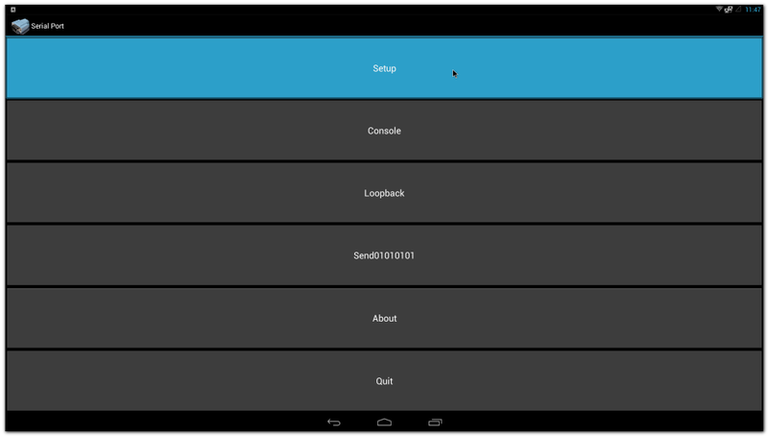
Serial Port Test
Serial Port Setup
-
Click "Serial Port"

-
Click "Setup"
-
Click "Device", and choose the used device (e.g.
ttymxc1)

-
Click "Baud rate", and choose the used baudrate (e.g. 115200)

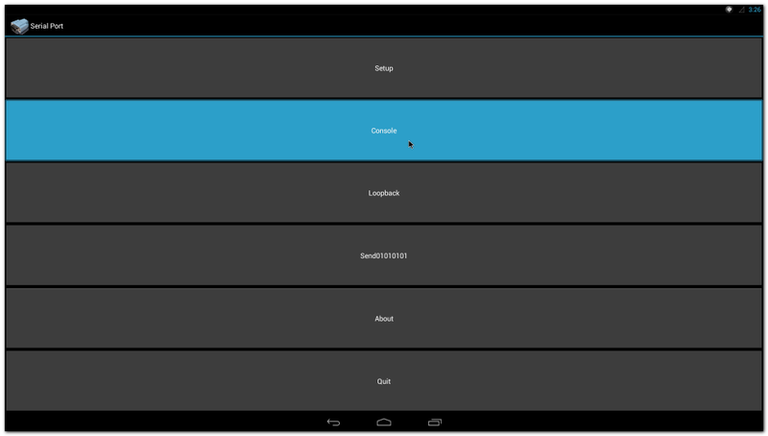
Console Test
-
Open one serial console.
-
Click "Console"
Typing some characters (e.g.
This is a test. 123456789ABCDEF) then pressing Enter in serial console, the identical message will show up in reception block as below:

On the other hand, typing some message (ex.
MESSAGE from Android) in emission block, the identical message will show up in serial console as below:

Loopback Test
- Plug loopback device into COM2
- Click "Loopback"
The loopback test result will show up as below

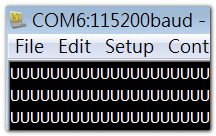
Send01010101 Test
- Open one serial console.
- Click Send01010101.
The character "U" (01010101) will show up continuously as below:
Display Output Option
Single HDMI Display
Perform the following commands in U-Boot:
> setenv bootargs 'console=ttymxc0,115200 androidboot.console=ttymxc0 vmalloc=400M init=/init video=mxcfb0:dev=hdmi,1920x1080M@60,bpp=32 video=mxcfb1:off video=mxcfb2:off video=mxcfb3:off fbmem=28M androidboot.processors=freescale'
> saveenv
> reset
Single VGA Display
> setenv bootargs 'console=ttymxc0,115200 androidboot.console=ttymxc0 vmalloc=400M init=/init video=mxcfb0:dev=lcd,1920x1080M@60,bpp=32 video=mxcfb1:off video=mxcfb2:off video=mxcfb3:off fbmem=28M androidboot.processors=freescale'
> saveenv
> reset
Single LVDS Display
> setenv bootargs 'console=ttymxc0,115200 androidboot.console=ttymxc0 vmalloc=400M init=/init video=mxcfb0:dev=ldb,1024x768M@60,bpp=24 video=mxcfb1:off video=mxcfb2:off video=mxcfb3:off fbmem=28M androidboot.processors=freescale'
> saveenv
> reset
Dual Display (HDMI + VGA)
> setenv bootargs 'console=ttymxc0,115200 androidboot.console=ttymxc0 vmalloc=400M init=/init video=mxcfb0:dev=hdmi,1920x1080M@60,bpp=32 video=mxcfb1:dev=lcd,1920x1080M@60,bpp=32 video=mxcfb2:off video=mxcfb3:off fbmem=28M,28M androidboot.processors=freescale'
> saveenv
> reset
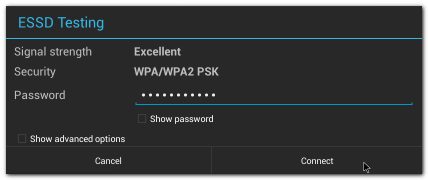
Network Setup
Wi-Fi
-
Click "Settings"

-
Turn Wi-Fi on

-
Choose ESSID (e.g.
ESSD Testing)

-
Input correct password
-
Wi-Fi Authenticating / Connecting / Obtaining IP address



-
Wi-Fi connected

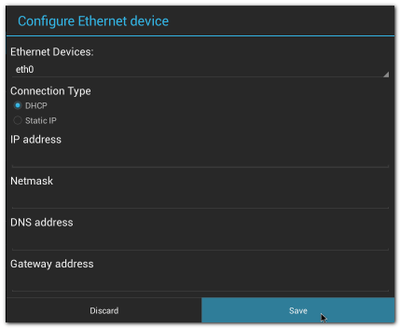
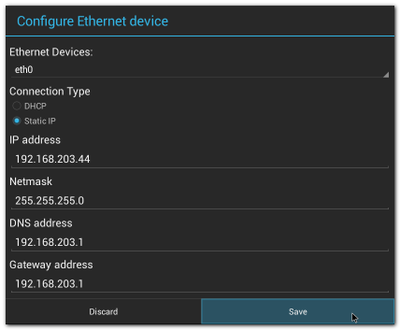
Ethernet
-
Click Settings → Ethernet configuration, then turn on Ethernet

-
Click Ethernet configuration

-
Choose Connection Type (DHCP or Static IP)
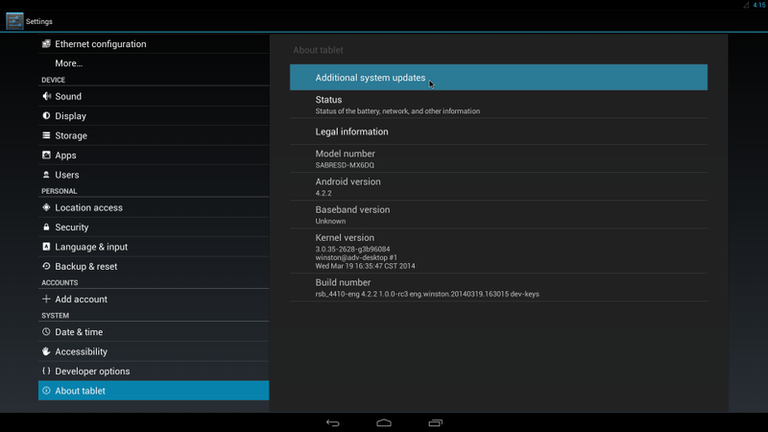
To update system
-
Refer to 1.4.6 to build OTA package.
-
Plug SD card that contains OTA package (
update.zip) into SD slot. -
Click Settings → About tablet → Addition system updates:
-
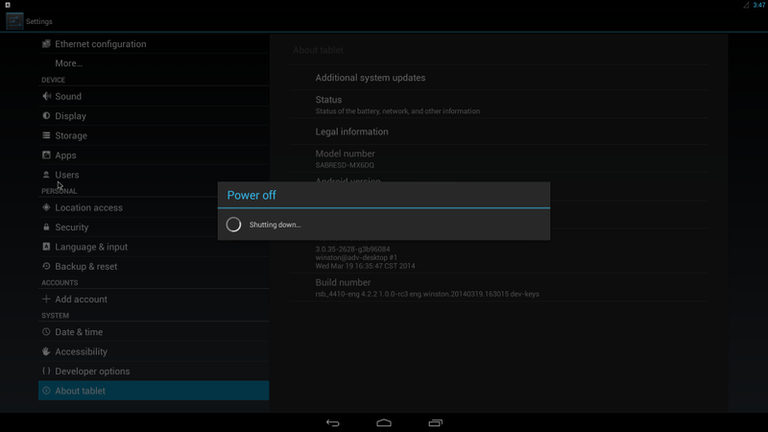
Wait for one moment, system will reboot for updating
-
It will take some time to update.
System Recovery
Please refer to 1.5.1 & 1.5.2 to create a bootable SD card and transfer whole system to on-board eMMC.